

طراحی کنترلرهای مود لغزشی و LQR روی سیستم تهویه مطبوع
نویسندگان :
سید مهدی ابطحی سید حسین ساداتی و علی غفاری دانشکده مهندسی صنایع و مکانیک
دانشکده مهندسی مکانیک دانشگاه آزاد اسلامی، واحد قزوین دانشگاه صنعتی خواجه نصیر الدین طوسی تاریخ دریافت: ۸۹/۱/۲۰ ؛ تاریخ پذیرش:۹۰/۲/۱۹
چکیده
در این مقاله، مدل غیر خطی سیستم تهویه مطبوع در مد سرمایشی با استفاده از بالانس معادلات جرم و انرژی استخراج و در فرآیند مدل سازی، تمامی اجزای سیستم جداگانه مدل شدند، جهت بررسی اعتبار مدل سازی انجام شده، نتایج به دست آمده از سیستم شبیه سازی شده با اطلاعات سیستم واقعی و همچنین با سایر تحقیقات مشابه مقایسه شده که نشان از اعتبار مدل سازی انجام گرفته است.
همچنین مدل غیرخطی سیستم با استفاده از روش خطی ساز ژاکوبین، خطی شده و سپس روی مدل خطی شده کنترلرهای خطی و کلاسیک (PID) و کنترلر مدرن و بهینه مربعی خطی ( L.QR) جهت تنظیم دمای آب ورودی به کویل سرمایشی طراحی شده است، در نهایت، کنترلر مود لغزشی (SMC) به عنوان کنترلر غیر خطی و مقاوم، روی مدل غیر خطی سیستم پیاده سازی شده است. از مقایسه نتایج حاصل از سیستم های کنترلی پیشنهاد شده مشخص می شود که کنترلر مود الغزشی باعث کاهش زمان رسیدن به نقطه تنظیم، حذف فراجهش و بهبود در کارکرد عملگرهای سیستم با کاهش مصرف انرژی می شود.
1- مقدمه
مود سرمایشی سیستم تهویه مطبوع، شامل دستگاه هوا ساز و فضاهای تهویه است. در این سیستم به منظور کنترل دما و رطوبت هوای اتاق، آب سرد ورودی به کویل سرمایشی که توسط یک واحد چیلر تأمین می شود، بخشی از حرارت هوای ورودی به کویل را جذب کرده و در نتیجه باعث کاهش دما و جذب رطوبت هوا می شود ۱ و ۲)
در سال های اخیر، نسبت به مدل سازی و کنترل سیستم های تهویه مطبوع توجه ویژه ای شده است. از آن جمله تشتوش” و همکارانش (۳) مدل کاملی از سیستم تهویه مطبوع را توسعه دادند که شامل مدل های ساده و خطی از تمامی اجزای سیستم بود. آنها برای مدل سازی کویل سرمایشی و رطوبت گیری، از کار المادی و میتالاس(۴) استفاده کردند که کويل مدل شده، شامل یک تابع ریاضی از اطلاعات ورودی و خروجی سیستم است.
به این ترتیب که دما و نسبت رطوبت خروجی از کویل تنها به دمای آب سرد ورودی به کویل وابسته و اثر دما و رطوبت هوای ورودی به کویل نادیده گرفته می شد. لازم به ذکر است که این ویژگی ضعف اصلی این مدل سازی قلمداد می شد. این مشکل با تلاش گوآنگ بوو و همکارانش اه] برطرف گردید. آنها یک مدل دینامیکی ساده از کویل سرمایی و رطوبت گیری را بر اساس بالانس معادلات انتقال جرم و حرارت استخراج کردند که شرایط هوای خروجی از کویل متأثر از شرایط هوا و آب سرد ورودی به کویل است. در کنار پژوهش های بالا، چندین مقاله در زمینه مدل سازی سیستم های تهویه مطبوع بررسی شده است [۶۸]
در زمینه کنترل سیستم های تهویه مطبوع، ظهیرالدین [۹] به توسعه سیستم های کنترلی بهینه و تنظیم کننده تطبیقی برای کنترل دمای ساختمان های هوشمند پرداخت. علاوه بر آن، ظهیرالدین و ژنگ [۱۰] مدل سیستم تهویه مطبوع هواساز با دبی هوای متغیر (VAV) را به منظور کنترل و مدیریت انرژی استخراج کردند. همچنین با توجه به رویکرد تحقیقی دیگر (۱۱ و ۱۲]، کنترل مود لغزشی (SMC) به دلیل به دست آوردن نتایج مناسب برای کنترل سیستم های غیر خطی مختلف مانند سیستم های فضایی، نیوماتیکی وه پیشنهاد می شود.
در این مقاله، یک مدل سازی جدید و غیرخطی از مود سرمایشی و رطوبت گیری سیستم تهویه مطبوع ارائه شده و سپس با خطی سازی ترم های غیر خطی مدل کنترل کلاسیک (PID) به عنوان اولین روش کنترلی روی سیستم مدار باز توسعه یافته است. در فاز بعدی به منظور کاهش زمان رسیدن پاسخ ها به مقدار مطلوب و مقدار مصرف انرژی سیستم، سیستم کنترلی بهینه و خطی مربعی (LQR) پرای کنترل سیستم مورد استفاده قرار گرفته است. در نهایت با طراحی سیستم کنترلی مود لغزشی برای مدل غیرخطی سیستم و مقایسه نتایج سیستم های کنترلی مدار بسته عملکرد مناسب کنترلرهای بهینه و مود الغزشی مشخص شده است،
۲- مدل سازی دینامیکی سیستم
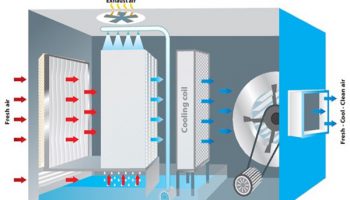
سیستم تهویه مطبوع شامل محفظه اختلاط، کویل سرمایی و رطوبت گیری، فن و فیلتر است که این بخش ها در دستگاه هواساز جای گرفته و به وسیله کانال هوای تهویه شده را به اتاق ها منتقل کرده و هوای برگشتی از اتاق را به هواساز بر می گرداند. در شکل ۱ دیاگرام کامل سیستم مدل سازی شده مشاهده می شود .
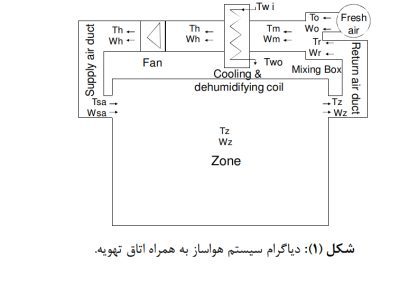 لازم به ذکر است که مدل سیستم به دو بخش دمایی و رطوبتی تقسیم می شود. با استفاده از این دو مدل، می توان دمای هوای خشک و نسبت رطوبت هوای اتاق و نقاط مختلف سیستم را تحلیل نمود. مدل دمایی سیستم، یک مدل غیرخطی با هشت متغير حالت است که دمای آب سرد ورودی به کویل به عنوان ورودی کنترلی و دمای هوای خشک اتاق به عنوان خروجی مدل است. همچنین مدل غیر خطی رطوبتی سیستم نیز دارای سه متغير حالت است که دمای آب سرد ورودی به کویل به منظور رطوبت گیری به عنوان ورودی کنترلی و نسبت رطوبت اتاق، خروجی سیستم است .
لازم به ذکر است که مدل سیستم به دو بخش دمایی و رطوبتی تقسیم می شود. با استفاده از این دو مدل، می توان دمای هوای خشک و نسبت رطوبت هوای اتاق و نقاط مختلف سیستم را تحلیل نمود. مدل دمایی سیستم، یک مدل غیرخطی با هشت متغير حالت است که دمای آب سرد ورودی به کویل به عنوان ورودی کنترلی و دمای هوای خشک اتاق به عنوان خروجی مدل است. همچنین مدل غیر خطی رطوبتی سیستم نیز دارای سه متغير حالت است که دمای آب سرد ورودی به کویل به منظور رطوبت گیری به عنوان ورودی کنترلی و نسبت رطوبت اتاق، خروجی سیستم است .
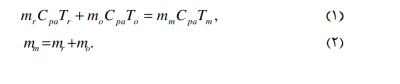
معادلات دیفرانسیل استخراج شده برای مدل سیستم بر اساس بالانس معادلات انتقال انرژی و جرم می باشند. در این مدل سازی، از تأثیر دمنده و فیلتر در تغییر دما و رطوبت هوا | صرف نظر شده است. مدل دینامیکی بخش های مختلف سیستم به وسیله معادلات دیفرانسیل و توابع تبدیل بیان شده که در فرایند شبیه سازی سیستم به کار می روند.
۱-۲ – مدل محفظه اختلاط
در محفظه اختلاط هوای برگشتی از اتاق با هوای تازه بیرون، به نسبت مساوی با یکدیگر ترکیب می شوند. از انتقال حرارت محفظه با هوای بیرون و همچنین اصطکاک جریان هوا با جدار داخلی داکت و افت فشار جریان هوا صرف نظر می شود. در نتیجه معادلات بالانس چرم و انرژی به صورت زیر بیان میشود .
 ۲-۲- مدل کویل سرمایی و رطوبت گیری
۲-۲- مدل کویل سرمایی و رطوبت گیری
کویل سرمایشی که قادر به رطوبت گیری هم می باشد، یک مبدل حرارتی هوا- آب است که با جریان یافتن آب سرد به داخل لوله های کویل، حرارت را از هوای گرم ورودی به کویل به دست می آورد که منجر به کاهش دما و تقطیر رطوبت هوا می شود. مدل سازی کویل سرمایی بر اساس بالانس معادلات جرم و انرژی انجام می شود. در فرآیند مدل سازی، فرض می شود که هوای مرطوب دارای رفتار گاز ایده آل بوده و ظرفیت حرارتی آب و چگالی رطوبت هوا ثابت در نظر گرفته می شوند، تغییرات رطوبت هوای اشباع نسبت به دما در محدوده کوچک تغییرات دما خطی فرض شده است. مطابق فرضیات بالا و با توجه به مقاله گوانگ بوو و همکارانش ا۵] مدل دینامیکی کویل سرمایی و رطوبت گیری بر اساس معادلات انتقال جرم و حرارت به صورت زیر استخراج می شود (۴ و ۵)
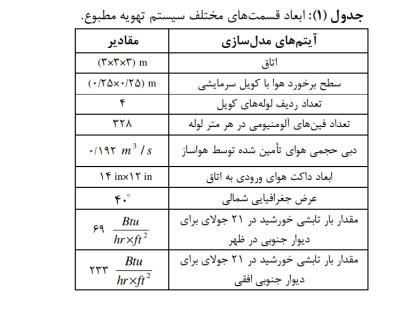
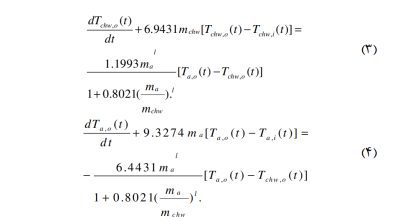 ضرایب معادلات بالا وابسته به ساختار و پارامترهای کویل مدل شده است، سطح برخورد هوا با لوله های کویل سرمایی برابر0/25m*0/25m با چهار ردیف لوله و ۳۲۸ فین آلومنیومی در هر متر است. ویژگی برجسته مدل کویل سرمایی و رطوبت گیری این است که در هر لحظه می تواند دمای هوای خشک (Td) و مرطوب (Tw) را تحلیل کند. از طرف دیگر مدل سازی کل سیستم بر اساس دمای هوای خشک و نسبت رطوبت (w) انجام شده است، بنابراین لازم است تا با استفاده از دمای هوای خشک و نسبت رطوبت هوای ورودی به کویل و با استفاده از معادلات حاکم بر نمودار مشخصات هوا، دمای هوای مرطوب را توسط رابطه (۵) استخراج کرد (۲)
ضرایب معادلات بالا وابسته به ساختار و پارامترهای کویل مدل شده است، سطح برخورد هوا با لوله های کویل سرمایی برابر0/25m*0/25m با چهار ردیف لوله و ۳۲۸ فین آلومنیومی در هر متر است. ویژگی برجسته مدل کویل سرمایی و رطوبت گیری این است که در هر لحظه می تواند دمای هوای خشک (Td) و مرطوب (Tw) را تحلیل کند. از طرف دیگر مدل سازی کل سیستم بر اساس دمای هوای خشک و نسبت رطوبت (w) انجام شده است، بنابراین لازم است تا با استفاده از دمای هوای خشک و نسبت رطوبت هوای ورودی به کویل و با استفاده از معادلات حاکم بر نمودار مشخصات هوا، دمای هوای مرطوب را توسط رابطه (۵) استخراج کرد (۲)

همچنین در هوای خروجی از کویل، مطابق رابطه (۶)، از روی دمای هوای خشک و مرطوب، نسبت رطوبت هوا استخراج شده تا در مراحل بعدی مدل سازی سیستم مورد استفاده قرار گیرد.
![]() در روابط (۵) و (۶) Pa مقداری ثابت و Psفشار هوای اشباع است که توسط رابطه (۷) بیان می شود (۲)
در روابط (۵) و (۶) Pa مقداری ثابت و Psفشار هوای اشباع است که توسط رابطه (۷) بیان می شود (۲)
 در معادله بالا T دمای هوای خشک بر حسب رنگین است که توسط رابطه Ra=[(C*1/8)+32]+459/67 به درجه سلسیوس تبدیل می شود، به منظور طراحی کنترلرهای خطی، باید ترمهای غیر خطی بالا خطی سازی شوند
در معادله بالا T دمای هوای خشک بر حسب رنگین است که توسط رابطه Ra=[(C*1/8)+32]+459/67 به درجه سلسیوس تبدیل می شود، به منظور طراحی کنترلرهای خطی، باید ترمهای غیر خطی بالا خطی سازی شوند
۳-۲ مدل کانال هوا
به طور کلی انتقال حرارت در کانال هوا شامل انتقال حرارت هدایتی در ضخامت جداره داکت و جابه جایی با هوای اطراف جدار داخلی و خارجی کانال است، میزان تغییرات دمای داکت که از کار کلارک و همکارانش [۷] استفاده شده به صورت زیر می باشد.
 ۴-۲ – مدل اتاق تهویه
۴-۲ – مدل اتاق تهویه
مدل فضای تهویه به وسیله سه متغير حالت دمای اتاق (Tz) دمای جدارهای اتاق شامل دیوارها و کف (,Tw1 ,Tw2 TR) و نسبت رطوبت هوای اتاق ( ( WZ W) بیان می شود. در مدل اتاق تأثیرات دیوارهای شمالی و جنوبی و همچنین جدارهای شرقی و غربی شبیه هم فرض شده اند، تأثیر سقف در انتقال حرارت از اتاق در کنار دیوارها جداگانه محاسبه شده و از انتقال حرارت با کف زمین چشم پوشی می شود. از تغییرات چگالی هوا در اثر تغییر دما و رطوبت هوا و همچنین از افت فشار هوای ورودی به اتاق با قسمت های داخلی اتاق صرف نظر می شود. از طرف دیگره گرمای محسوس و نهان تولیدی توسط ساکنین اتاق، لامپها و… به عنوان ورودی های کنترل نشده در نظر گرفته می شوند. با توجه به شرایط و فرضیه های فوق، معادلات بالانس چرم و انرژی به صورت زیر استخراج می شوند (۶) .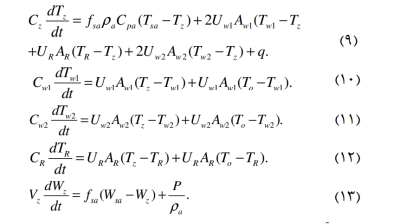
که در آن Pو و پارامترهای ثابت مدل هستند.
۳- شبیه سازی کامپیوتری سیستم
مدل هر جزء از سیستم که شامل مدل های غیر خطی دمایی و رطوبتی است، می تواند دمای خشک و رطوبت هوا در هر نقطه ای از سیستم را تحلیل نماید. در اینجا با استفاده از روش ژاکوبین (۱۳)، ترم های غیر خطی مدل خطی سازی شده است. لازم به ذکر است که شرایط هوای بیرون در عملکرد تابستانی برابر W0 =0/01251kg/kg(d.a) وT0=32◦c است. همچنین دستگاه هواساز مدل سازی شده از نوع دبی ثابت و تک ناحیه ای بوده و مقدار دبی جریان ثابت هوا برابر S =0/192m3/s ʄ و مقدار حرارت اکتسابی توسط ساکنین و لامپ های روشنایی به ترتیب kw ۰/۱۵ و kw ۰/۵ است همچنین مقادیر ابعاد قسمت های مختلف سیستم واقعی مدل شده، در جدول ۱ داده شده است .
در ادامه مدل سیستم در محیط نرم افزاری Matlab 7.1-SIMulink شبیه سازی شده است. شرایط اولیه سیستم مدار بازی به منظور انجام مقایسه با مدل سازی صورت گرفته با مقاله [۳]. W0 =0/025Kg/Kg(d.a.) و= 30C T0 در نظر گرفته شده و شرایط اولیه سیستم مدار بسته در مقایسه با = 0/015 kg ( d . a . ) [ 3 ] W0 و T0 = 32◦C
 ۱-۳- بررسی اعتبار و آنالیز خطای مدل سازی
۱-۳- بررسی اعتبار و آنالیز خطای مدل سازی
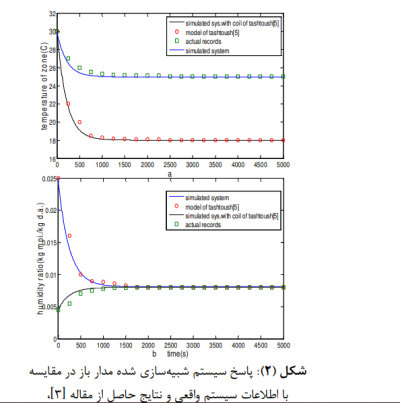
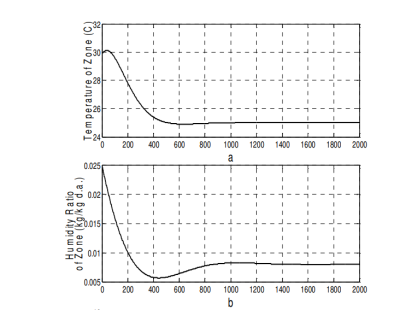
در این بخش، پاسخ های سیستم مدار باز در شكل ۲ نمایش داده می شود. مطابق این نمودارها، پاسخ های سیستم مدار باز در محیط شبیه سازی با اطلاعات حاصل از سیستم واقعی به منظور اعتبار سنجی فرایند مدل سازی مقایسه شده و از آنجایی که مدل کلی با سیستم مدل شده توسط تشتوش و همکارانش [۳] مشابه می باشد، نتایج مدل سازی این سیستم با کار آنها نیز مقایسه گردید.
در شکل ۲-a برای دمای آب ورودی به کوپل برابر= 6/5 c Tchw,i به عنوان ورودی کنترلی دمای اتاق به مقدار 25◦C افزایش یافته و نسبت رطوبت هوای اتاق به kg/kg (d .a.) 0/008می رسد، قابل ذکر است که به میزان =4◦C Tchw,I دمای اتاق به 18◦C می رسد. همچنین تغییرات دما و رطوبت اتاق نسبت به تغییرات دمای آب ورودی به کویل سرمایی کاملا منطبق بر سیستم واقعی است که همگی نشان از صحت مدل سازی انجام شده در مقایسه با سیستم واقعی دارد، بنابراین اعتبار مدل تأیید می شود. در پایان برای بررسی خطای مدل سازی، خطای مربعی میانگین ریشه به صورت روابط (۱۴) و (۱۵) بیان می شود.
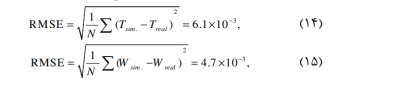 که در این معادله ، Treal دمای اتاق در سیستم واقعی و Tcim دمای اتاق در سیستم شبیه سازی شده است. همچنین ,W cim و Wrealمقادیر نسبت رطوبت اتاق در محیط شبیه سازی شده و سیستم واقعی است، مقادیر کم خطاهای آنالیز شده نشان از دقت بالای مدل سازی دارد .
که در این معادله ، Treal دمای اتاق در سیستم واقعی و Tcim دمای اتاق در سیستم شبیه سازی شده است. همچنین ,W cim و Wrealمقادیر نسبت رطوبت اتاق در محیط شبیه سازی شده و سیستم واقعی است، مقادیر کم خطاهای آنالیز شده نشان از دقت بالای مدل سازی دارد .
 ۴- سیستم کنترلی
۴- سیستم کنترلی
مدل غیر خطی سیستم، توسط روش ماتریس ژاکوبین خطی سازی می شود (۱۳] که ماتریس های فضای حالت مدل خطی در پیوست بیان شده است. قبل از طراحی سیستم کنترلی، کنترل پذیری مدل خطی سیستم تهویه مطبوع بررسی می شود، مطابق تعریف کنترل پذیری، در صورتی که مرتبه ماتریس کنترل پذیری که به صورت….An-1B ] p = [ B AB A2B بیان می شود برابر با مرتبه سیستم باشد، در این صورت سیستم کنترل پذیر است.
پس از محاسبه ماتریس فوق برای مدل های دمایی و رطوبتی، مرتبه ماتریس P برای مدل دمایی و رطوبتی به ترتیب برابر ۸ و ۳ می باشد که نشان دهنده کنترل پذیری سیستم است. پس از اثبات کنترل پذیری سیستم کنترلرهای خطی PID و LQR روی مدل خطی سیستم مدار باز طراحی شدند. همچنین برای حصول نتایج مطلوب تر، کنترل مقاوم و غیر خطی مود لغزشی روی مدل غیر خطی مدل طراحی شده است.
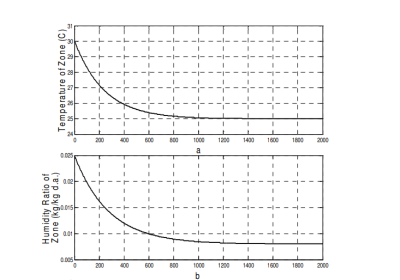
در این مدل، دمای آب سرد ورودی به کویل برای کنترل دما و رطوبت هوای اتاق تنطیم می شود، عملکرد سیستم کنترلی دما و رطوبت در حالی که کاملا متفاوت از یکدیگرند اما به طور همزمان روی مدل های دمایی و رطوبتی اعمال می شوند، زیرا دو مدل دمایی و رطوبتی کوپله هستند و آب سرد ورودی به کویل در یک لحظه، هم دما و هم رطوبت هوای اتاق را تنظیم و کنترل می کند. این سیستم کنترلی در اقلیمی با شرایط محیطی گرم و مرطوب که در اینجا مورد بحث است، کارایی دارد. مقادیر ورودی مبنا برای مدل دمای Tdesire = 25◦C و برای مدل رطوبتی =0/008Kg/kg(d.a.) Wdesireاست به منظور به کارگیری سیستم های کنترلی خطی PID و LOR روی سیستم واقعی، نصب ترموستات (سنسور دما) و هیومیدیستات (سنسور رطوبت در اتاق و برخی نقاط دستگاه هواساز ضروری است، اما برای اجرا کنترلر مود لغزشی روی سیستم واقعی، یک مشاهدگر حالت ساده برای تخمین برخی مشتقات متغیرهای حالت مورد نیاز است. یک چنین
مشاهده گر حالتی در کنار ساختار کنترلی مود لغزشی الزامی می باشد.
۱-۴- کنترلر
در میان سیستم های کنترل کلاسیک، کنترلر تناسبی مشتق گیر و انتگرال گیر ( PID-action ) دارای پایداری مناسب بدون خطای حالت ماندگار می باشد. تابع تبدیل کنترلر PID به صورت زیر بیان می شود [۳] .
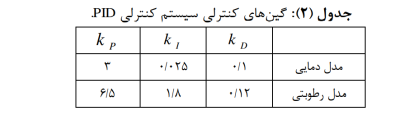
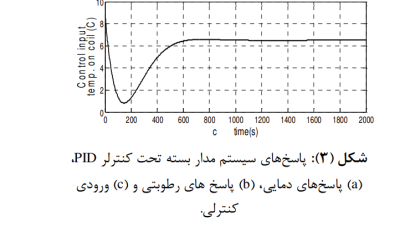
 که در آن، KPگین تناسبی را KI گین انتگرال گیر وKD گین مشتق گیر است. برای محاسبه گینهای کنترلی، از روش حلقه بسته زیگلر – نیکلز استفاده میشود و سپس با سعی و خطا به طور دقیق تنظیم می شوند. مقادیر دقیق گینهای کنترلی در جدول ۲ بیان شده است. نتایج حاصل از سیستم کنترلی PID در شکل ۳ نشان داده شده است .
که در آن، KPگین تناسبی را KI گین انتگرال گیر وKD گین مشتق گیر است. برای محاسبه گینهای کنترلی، از روش حلقه بسته زیگلر – نیکلز استفاده میشود و سپس با سعی و خطا به طور دقیق تنظیم می شوند. مقادیر دقیق گینهای کنترلی در جدول ۲ بیان شده است. نتایج حاصل از سیستم کنترلی PID در شکل ۳ نشان داده شده است .
۲-۴ – کنترلر بهینه LQR
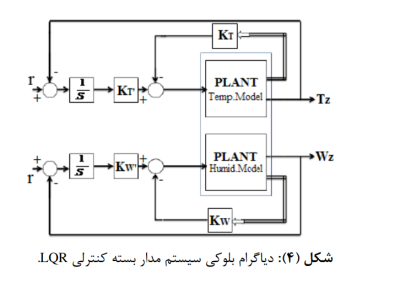
به منظور دستیابی به نتایج بهتر در کنار تحقق دیگر اهداف کنترلی، سیستم کنترلی مدرن و بهینه خطی مربعی LQR’ روی سیستم مدار باز پیاده سازی شده است. برای این کاره تمامی متغیرهای حالت سیستم بازخورد می شوند. از آنجایی که مدل دمایی مرتبه ۸ و مدل رطوبتی مرتبه ۳ است، بنابراین در مدل دمایی ۸ سیگنال و در مدل رطوبتی کنترلر بهینه فوق، ۳ سیگنال بازخوردی وجود دارد.
متغیرهای حالت سیستم دمایی,Tw2,TR,Tr, Th , Tsa , Tchw,o(T) TZ,TW1 و متغیرهای حالت سیستم رطوبتی شامل Tchw,o(W) و Wz ,Whمی باشند. که ( Tchw,o(T دمای آب خروجی از کویل در مدل دمایی و Tchw,o(W)در مدل رطوبتی است که جداگانه تحلیل می شوند. دیاگرام کنترلی سیستم LQR در شکل ۴ نشان داده شده است.
وجود عامل انتگرال گیر (l-action) در دیاگرام بالا برای از بین بردن خطای حالت ماندگار سیستم می باشد. برای محاسبه گین های کنترلی IQR ابتدا مدل فضای حالت سیستم استخراج می شود و ماتریس های آن که شامل C ،B ،A وD می باشند که برای مدل های دمایی و رطوبتی مطابق پیوست محاسبه شده، همچنین ماتریس های R و Q برای تعیین پارامترهای سیستم کنترلی طراحی می شوند. سپس گینهای کنترلی به وسیله ماتریس همیلتونین که به صورت زیر تعریف می شود، استخراج می گردند :
که R ماتریس مثبت معین و ماتریس Q و به صورت [I] Q= – CTC=1/4تعریف می شود. از آنجایی که سیستم مورد مطالعه تک ورودی است، ماتریس 1*1,R با اسکالر می باشد و مقدار آن برابر 10/7است .
 بعد از محاسبه مقادیر ویژه و بردارهای ویژه ماتریس همیلتونین، ماتریسی که شامل پاسخ های مثبت معادله ریکانی است به دست می آید. اجزاء ماتریس همان نگین های کنترلی برای متغیرهای کنترلی است که در رابطه (۱۸) نشان داده شده است .
بعد از محاسبه مقادیر ویژه و بردارهای ویژه ماتریس همیلتونین، ماتریسی که شامل پاسخ های مثبت معادله ریکانی است به دست می آید. اجزاء ماتریس همان نگین های کنترلی برای متغیرهای کنترلی است که در رابطه (۱۸) نشان داده شده است .
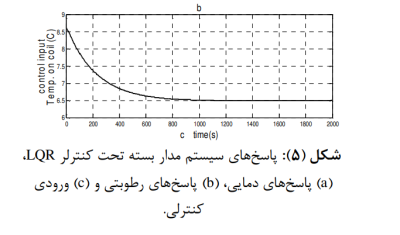
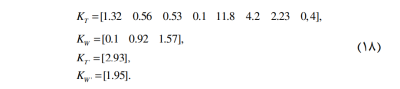 نتایج سیستم کنترلی LQR در شکل ۵ نشان داده شده است.
نتایج سیستم کنترلی LQR در شکل ۵ نشان داده شده است.
 ۳-۴- کنترل مود لغزشی (SMC)
۳-۴- کنترل مود لغزشی (SMC)
سیستم کنترل مدرن، پاسخ های مناسبی را ایجاد می کند و عملکرد خوبی دارد، از طرف دیگر مدل سیستم تهویه مطبوع شامل فرایندهای پیچیده ای است و جزء سیستم های غیر خطی از مرتبه بالا هستند. در نتیجه به دلیل وجود عدم قطعیت غیرساختاری در فرایند مدل سازی، کنترلرهای مدرن ممکن است در حین پیاده سازی روی سیستم واقعی به خوبی کار نکنند و یا حتی ممکن است پاسخ های سیستم را ناپایدار کنند، در این حالت، نیاز به یک کنترلر مقاوم ضروری به نظر می رسد و روش کنترل مود الغزشی برای کنترل سیستم انتخاب می شود. برای طراحی سیستم کنترل مود لغزشی، ابتدا معادله غیرخطی سیستم به صورت زیر تعریف می شود
![]() (f(x تابع غیر خطی است که اطلاعات کافی از آن در دست نیست و پارامترهایی که در آن قرار دارد به طور دقیق تعریف نشده و تحت شرایطی می تواند تغییرات کوچکی داشته باشد. از آن جمله می توان به پارامترهای …. αδ,β,γ, اشاره کرد که شامل مقادیر ثابتی مانند ظرفیت حرارتی، چگالی هوا و ضریب هدایت حرارتی است که با تغییر دما و رطوبت هوا تغییر می کنند، در این سیستم مدل سازی، مقادیر پارامترهای تابع فوق در دمای مبنای 25◦C محاسبه می شوند.
(f(x تابع غیر خطی است که اطلاعات کافی از آن در دست نیست و پارامترهایی که در آن قرار دارد به طور دقیق تعریف نشده و تحت شرایطی می تواند تغییرات کوچکی داشته باشد. از آن جمله می توان به پارامترهای …. αδ,β,γ, اشاره کرد که شامل مقادیر ثابتی مانند ظرفیت حرارتی، چگالی هوا و ضریب هدایت حرارتی است که با تغییر دما و رطوبت هوا تغییر می کنند، در این سیستم مدل سازی، مقادیر پارامترهای تابع فوق در دمای مبنای 25◦C محاسبه می شوند.
همچنین مقادیر پارامترهای تابع ʄ در دماهای غیر از دمای مبنا، با استفاده از هندبوک های تهویه مطبوع استخراج می شوند (۲). به منظور طراحی کنترل مود الغزشی، تابع کلیدزنی تحت رابطه زیر تعریف می شود [۱۳] .
![]() که n پارامتر وابسته به مرتبه سیستم و ʎپارامتری ثابت در تابع کلیدزنی است. این تابع در واقع همان سطح لغزش است و رفتار سیستم زمانی که در این سطح قرار می گیرد، مود الغزشی نامیده می شود. بنابراین طراحی سیستم کنترلی به مسئله پایداری سیستم روی تابع کلیدزن خلاصه می شود. در نتیجه با صفر شدن مقدار تابع S(x,t) یک ورودی کنترلی ایجاد می شود تا اینکه تابع S2 به عنوان تابع لیا پائف، در شرط الغزش مطابق رابطه زیر صدق کند؛
که n پارامتر وابسته به مرتبه سیستم و ʎپارامتری ثابت در تابع کلیدزنی است. این تابع در واقع همان سطح لغزش است و رفتار سیستم زمانی که در این سطح قرار می گیرد، مود الغزشی نامیده می شود. بنابراین طراحی سیستم کنترلی به مسئله پایداری سیستم روی تابع کلیدزن خلاصه می شود. در نتیجه با صفر شدن مقدار تابع S(x,t) یک ورودی کنترلی ایجاد می شود تا اینکه تابع S2 به عنوان تابع لیا پائف، در شرط الغزش مطابق رابطه زیر صدق کند؛
![]()
بنابراین بهترین تخمین ورودی کنترلی برای سیستم از نتیجه معادله Sg=0و به صورت (۲۲) به دست می آید:
![]() همچنین برای به دست آوردن شرط لغزش (۲۱)، یک ترم گسسته به سطح لغزش اضافه می شود و قانون ورودی کنترلی به صورت زیر بیان می شود :
همچنین برای به دست آوردن شرط لغزش (۲۱)، یک ترم گسسته به سطح لغزش اضافه می شود و قانون ورودی کنترلی به صورت زیر بیان می شود :
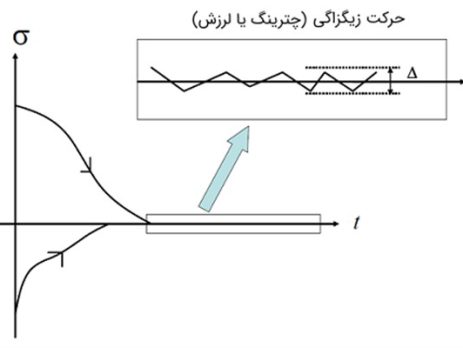
 به خاطر وجود تابع علامت در رابطه بالا، در عمل پدیده زیگزاگی در پاسخ ها ایجاد می شود. برای حل این مشکل، یک لایه مرزی اطراف سطح کلیدزنی معرفی شده و به جای تابع علامت از تابع اشباع به صورت زیر استفاده می شود؛
به خاطر وجود تابع علامت در رابطه بالا، در عمل پدیده زیگزاگی در پاسخ ها ایجاد می شود. برای حل این مشکل، یک لایه مرزی اطراف سطح کلیدزنی معرفی شده و به جای تابع علامت از تابع اشباع به صورت زیر استفاده می شود؛
 که در آن، ȹ ضخامت لایه مرزی است و همچنین K به صورت زیر است :
که در آن، ȹ ضخامت لایه مرزی است و همچنین K به صورت زیر است :
![]()
Fقدر مطلق اختلاف بین توابع ʄ ʄˆ, است کهˆ ʄ همان تخمین تابع ʄ می باشد. به منظور طراحی کنترل مود لغزشی بر روی مدل سیستم، معادله خروجی سیستم به صورت معادلات زیر بیان می شوند که در مدل دمایی به صورت زیر است [۱۳]
![]() و در مدل رطوبتی به صورت زیر است (۱۳)
و در مدل رطوبتی به صورت زیر است (۱۳)
![]()
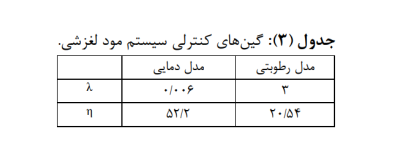
![]() از معادلات فضای حالت سیستم به دست می آیند و در واقع معادلات (۲۶) و (۲۷) به فرم معادله (۱۹) نوشته می شوند. لازم به ذکر است که تعیین توابع t و b کار پیچیده ای می باشد. مقادیر گینهای کنترلی مود لغزشی در جدول ۳ محاسبه و بیان شده است.
از معادلات فضای حالت سیستم به دست می آیند و در واقع معادلات (۲۶) و (۲۷) به فرم معادله (۱۹) نوشته می شوند. لازم به ذکر است که تعیین توابع t و b کار پیچیده ای می باشد. مقادیر گینهای کنترلی مود لغزشی در جدول ۳ محاسبه و بیان شده است.
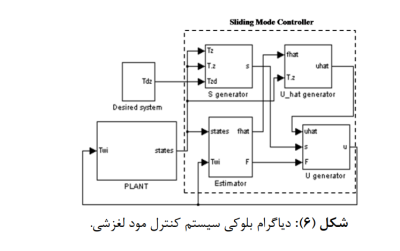
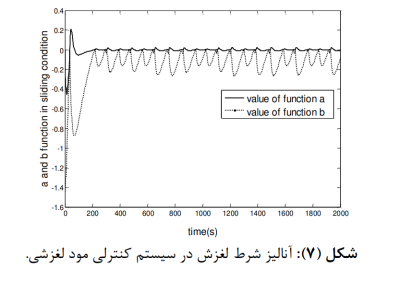
دیاگرام سیستم کنترلی مود لغزشی در شکل ۶ نشان داده شده است. همچنین آنالیز شرط لغزش و نحوه برقراری آن در شكل ۷ نمایش داده شده است، مطابق شکل ۷ که منحنی b همان تابع و منحنی a نیز همان تابع
و منحنی a نیز همان تابع ![]() است .
است .
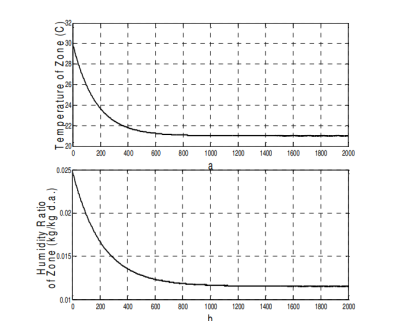
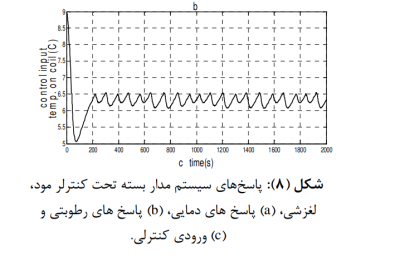
برقراری رابطه شرط لغزش (۲۱) در فرایند کنترلی کاملا مشهود است. همچنین پاسخ های سیستم مدار بسته تحت کنترلر مود لغزشی در شکل ۸ قابل مشاهده است.
اگرچه پاسخ های سیستم مدار بسته تحت کنترلر مود لغزشی دارای پدیده زیگزاگی در پاسخ ها است، اما دامنه آنها بسیار کوچک بوده و از طرف دیگر با توجه به لخت بودن سیستم تهویه مطبوع و ثابت زمانی زیاد آن، حرکت زیگزاکی در پاسخ های سیستم واقعی چندان مشهود نبوده و به طور کلی طراحی مناسبی برای کنترل سیستم صورت پذیرفته است. همچنین کنترلر مود لغزشی طراحی شده در برابر نویزهای اعمالی بر سیستم مقاوم می باشد. برای اثبات این موضوع، در محيط شبیه سازی نویز سفید در ثانیه پنجم بر سیستم وارد می شود که پاسخهای سیستم حاکی از مقاوم و مناسب بودن رفتار سیستم در برابر نویزهای اعمالی بر سیستم است.
در این سیستم، دمای آب سرد ورودی به کویل سرمایی و رطوبت گیری به عنوان ورودی کنترلی سیستم است. در واقع عملکرد ورودی کنترلی نشان عملکرد عملکرهای سیستم است. مساحت زیر منحنی ورودی کنترلی بین منحنی تا مقدار ورودی مبنا، نشان دهنده مصرف انرژی سیستم می باشد. بنابراین ورودی کنترلی تحت سیستم مود لغزشی دارای فراجهش کمی است و در مدت زمان کمی به مقدار حالت ماندگار می رسد
در نهایت مزیت اصلی کنترل مود لغزشی نسبت به کنترلرهای مدرن، مقاوم بودن سیستم در حین پیاده سازی روی سیستم واقعی است. اگرجه کنترلرهای مدرن، پاسخهای مناسبی در محیط شبیه سازی ایجاد می کند اما به دلیل وجود عدم قطعیت های ساختاری و پارامتری بین مدل و سیستم واقعی عملکرد مقاومی از خود نشان نمی دهند .
 ۵- نتیجه گیری
۵- نتیجه گیری
در این مقاله، ابتدا مدل دینامیکی غیرخطی مود سرمایشی سیستم تهویه مطبوع با استفاده از بالانس معادلات انتقال جرم و انرژی استخراج شده و مدل، شامل اتاق تهویه و دستگاه هواساز است، توسط این مدل، دما و نسبت رطوبت هر نقطه از سیستم مورد تحلیل قرار می گیرد.
در ادامه با مقایسه نتایج شبیه سازی سیستم مدل با اطلاعات حاصل از سیستم واقعی و مقالات مشابه، اعتبار مدل سازی تأیید می شود. در این مدل، آب سرد ورودی به کویل سرمایی و رطوبت گیری به عنوان ورودی کنترلی برای تنظیم دما و رطوبت هوای اتاق مورد استفاده قرار می گیرد. برای رسیدن به این هدف، سه استراتژی مختلف کنترلی برای تنظیم دمای آب سرد ورودی به کویل به کار گرفته شده است.
در ابتدا کنترل خطی PID روی مدل خطی سازی شده سیستم طراحی شد که گین های کنترلی آن با استفاده از روش زیگلر – نیکلز و سعی و خطا محاسبه شدند. سپس کنترلر مدرن و بهینه LQR به منظور کاهش زمان رسیدن پاسخ به ورودی مبنا و کاهش مصرف انرژی بر اساس روش همیلتونین روی مدل پیاده سازی شد، در نهایت سیستم کنترلی غیر خطی و مقاوم مود لغزشی به منظور مقابله با عدم قطعیت های غیر ساختاری مدل و همچنین حصول پاسخ های بهتر نسبت به کنترل مدرن بر روی سیستم مدار باز طراحی گردید.
پس از شبیه سازی سیستم های کنترلی، پاسخ کنترلر مود لغزشی در زمان مناسب و به صورت کاملا هموار به مقادیر مطلوب می رسد و کار کرد عملگر سیستم برای تولید آب سرد ورودی به کویل سرمایی توسط رفتار ورودی کنترلی مود الغزشی تحلیل می شود. از آنجایی که سطح زیر منحنی ورودی کنترلی نشان دهنده میزان مصرف انرژی سیستم است و مطابق شکل c-8 کنترلر مود الغزشی باعث کاهش زمان نشست کاهش مقدار فراجهش پاسخ ها و همچنین کاهش میزان مصرف انرژی کلی سیستم می شود. |
مراجع
- Trott, A.R. and Welch T. *Refrigeration and AirConditio”, Third Edition, McGraw Hill 1981
- ASHRAE Inc, “ASHRAE Handbook of Fundamentals”, Published by the ASHRAE Inc, 1995.
- Tashtoush, B., Molhim, M., and Al-rousan, M. “Dynamic Model of an HVAC System for Control Analysis”, Energy, Vol. 30, No. 10, pp. 1729-1745, 2005.
- Elmahdy, A.H. and Mitalas, G.P. “Simple Model for Cooling and Dehumidifying Coils for use in Calculating Energy Requirements for Buildings”,
ASHRAE Trans., Vol. 83, No. 2, pp. 103-17, 1977.
- Jin, G.Y., Cai, W.J., Wang, Y.W., and Yao, Y. “A Simple Dynamic Model of Cooling Coil Unit”, Energy Conversion and Management, Vol. 47, No’s. 15-16, pp. 2656-2672, 2006.
- Riederer, P., Marchio, D., Visier J.C., Husaunndee,A., and Lahrech R. “Effects of Room Modeling and Sensor Position on Performance Assessment of Variable Air Volume System, Energy Building Trans., Vol. 37, No. 1, pp. 777-90, 2002
- 7. Clark, D. R., Hurley, C.W., and Hill, C.R.*Dynamic Models for HVAC System Components”, ASHRAE Trans., Vol. 91, No. 1, pp.737-51, 1985. 8. Wong, J.K.W. and Li, Heng “Application and
Validation of Selection Evaluation Model for Intelligent HVAC Control System”, Automation in
Construction, Vol. 19, No. 2, pp. 261-169, 2010.
- Zaheer-Uddein, M. “Sub-Optimal Controller for a Space Heating System”, ASHRAE Trans., Vol. 99,
No. 1, pp. 201-208, 1995. 10. Zaheer-Uddein, M. and Zheng, G.R. “A Dynamic
Model of a Multizone VAV System for Control Analysis”, ASHRAE Trans., Vol. 100, No. 1, Part
- 1. pp. 219-228, 1994.
- Moosavian1, S.A.A., Sadati, S.H., Homaeinejad, M.R. “Regulated Sliding Mode Control of Satellite Rotation: Trade-off Between Tracking Precision and Energy Consumption”. Mech. & Aerospace Eng. J. Vol. 89, No. 1, pp. 89-100, 2005 (In
Persian)
- Najafi, F. and Fathi, M., “Position Control of an Experimental Servo Pneumatic Actuator. Using Sliding Mode Control”, Mech. & Aerospace Eng. J. Vol. 3, No. 3, pp. 60-74, 2006 (In Persian)
- Slotine, J.J.E. and Li, W. “Applied Nonlinear Control”, Printice Hall, 1991..





دیدگاهتان را بنویسید